理科において、力は大きさと向きを持つ量であると習っただろう。大きさと向きを持つ量は、力の他にも、速度や風の吹き方などがある。
例えば、ある地点ある時刻における風の吹き方は、風速と風向から成り立つ。このように、大きさと向きを持つ量を導入すると、これらを効率よく扱える。
このページでは、大きさと向きを持つ量であるベクトルを扱う。
また、図形の問題に対して代数的なアプローチを取れるのもベクトルの利点の一つである。
平面上のベクトル[編集]

平面上の点  から点
から点  へ向かう矢印を考える。このような矢印のように向きを持つ線分を有向線分という。
へ向かう矢印を考える。このような矢印のように向きを持つ線分を有向線分という。
このとき、点 を始点、点 を終点という。
有向線分で、大きさと方向が同じものはベクトルとして同じものとする。
有向線分は位置、長さ(大きさ)、向きという情報を持つ。ベクトルは、有向線分の持つ情報のうち、位置の情報を忘れて、大きさ、向きだけに着目したものと考えることができる。
有向線分  で表されるベクトルを
で表されるベクトルを  とかく。ベクトルは一文字で
とかく。ベクトルは一文字で  などと表されることがある[1]。ベクトル の大きさを
などと表されることがある[1]。ベクトル の大きさを  で表す。
で表す。
有向線分 、有向線分  に対し、大きさが等しく、向きが等しいなら、位置が違っていても、ベクトルとして等しく、
に対し、大きさが等しく、向きが等しいなら、位置が違っていても、ベクトルとして等しく、 である。[2]
である。[2]
大きさが 1 であるベクトルを単位ベクトルという。
 ベクトル
ベクトル  の逆ベクトル
の逆ベクトル
ベクトル に対し、ベクトル と方向が逆で、大きさが等しいベクトルを逆ベクトルといい、 とかく。
とかく。
始点と終点が等しいベクトルを零ベクトルといい、 で表す。任意の点
で表す。任意の点  に対し、
に対し、 である。ゼロベクトルの大きさは 0 で、向きは考えないものとする。
である。ゼロベクトルの大きさは 0 で、向きは考えないものとする。
ベクトルの加法[編集]
 ベクトルの和
ベクトルの和
ベクトル  に対し、
に対し、 となる点をとる。このときベクトルの加法を
となる点をとる。このときベクトルの加法を  で定める。
で定める。
ベクトルの加法について以下が成り立つ。


 ベクトルの加法は可換である
ベクトルの加法は可換である
また、 とする。
とする。
ベクトルの減法[編集]
ベクトル に対し、  とかく。
とかく。
 ベクトルの減法
ベクトルの減法
ベクトルの実数倍[編集]
ゼロベクトルはないベクトル と実数  に対し、ベクトルの実数倍
に対し、ベクトルの実数倍  を以下のように定める。
を以下のように定める。
 のとき、ベクトル と方向が同じで、大きさが 倍されたベクトル
のとき、ベクトル と方向が同じで、大きさが 倍されたベクトル のとき、ゼロベクトル
のとき、ゼロベクトル  のとき、逆ベクトル と方向が同じで、大きさが 倍されたベクトル
のとき、逆ベクトル と方向が同じで、大きさが 倍されたベクトル
またゼロベクトル に対し、実数倍を  で定める。
で定める。
以下の性質がなりたつ。



ベクトルの平行・垂直[編集]
ゼロベクトルではないベクトル  に対し、
に対し、 となる点をとる。
となる点をとる。
このとき、直線  と直線
と直線  が平行であるとき、ベクトル は平行であるといい、
が平行であるとき、ベクトル は平行であるといい、  で表す。
で表す。
また、直線 と直線 が垂直であるとき、ベクトル は垂直であるといい、 で表す。
で表す。
ベクトル が平行のとき、明らかに、片方のベクトルを実数倍すれば大きさと向きが一致するので、
 となる実数 が存在する
となる実数 が存在する
が成り立つ。
 ベクトルの実数倍
ベクトルの実数倍
ベクトルの分解[編集]
ベクトル がともにゼロベクトルでなく( ) 、平行でないとき、任意のベクトル
) 、平行でないとき、任意のベクトル  に対して、
に対して、  となる実数
となる実数  を取ることができる。
を取ることができる。
証明
 となる点をとる。点
となる点をとる。点  を通り、直線
を通り、直線  に平行な直線が、それぞれ 直線
に平行な直線が、それぞれ 直線  と交わる点をそれぞれ
と交わる点をそれぞれ  と置く。
と置く。
このとき、  となる実数 を取ることができる。ここで、四角形
となる実数 を取ることができる。ここで、四角形  は平行四辺形なので、 が成り立つ。
は平行四辺形なので、 が成り立つ。
ベクトルの成分表示[編集]
ベクトル に対して、座標平面上の原点を  とするとき、
とするとき、 となる点
となる点  を取ることができる。そこで、
を取ることができる。そこで、  をベクトル の成分表示とし、
をベクトル の成分表示とし、  、または、縦に並べて、
、または、縦に並べて、  と書く。
と書く。
ベクトル に対して、 となる点
となる点  をとり、
をとり、 とするとき
とするとき
 点
点  が一致する
が一致する  かつ
かつ 
また、 に対して、 とするとき、 は線分  の長さなので、
の長さなので、

である。

ベクトル  に対して、
に対して、



がなりたつ。
位置ベクトル[編集]
ある点を基準にして、その点を始点とするベクトルについて考えることにより、ベクトルを用いて点の位置関係について考察することができる。
点の位置関係基準となる点  をあらかじめ定める。このとき、点
をあらかじめ定める。このとき、点  に対して、ベクトル
に対して、ベクトル  を点 の位置ベクトルという。位置ベクトル で与えられる点 を
を点 の位置ベクトルという。位置ベクトル で与えられる点 を  で表す。
で表す。
また、点  のとき、
のとき、 が成り立つ。
が成り立つ。
内分点・外分点の位置ベクトル[編集]
以下、位置ベクトルの基準点を点 とする。
点  を通る線分
を通る線分  を
を  に内分する点
に内分する点  を求める。
を求める。
 より、
より、 したがって、
したがって、 である。[3]
である。[3]
次に、点 を通る線分 を に外分する点  を求める。
を求める。
 の場合は、
の場合は、  より、
より、 したがって、
したがって、 である。[4]
である。[4]
 の場合は、
の場合は、 に注意して同様に計算すれば、前と同じ、 が得られる。[5]
に注意して同様に計算すれば、前と同じ、 が得られる。[5]
三角形の重心の位置ベクトル[編集]
三角形  に対し、
に対し、  と置く。この三角形 の重心
と置く。この三角形 の重心  を求める。
を求める。
線分  の中点を
の中点を  とすると、点
とすると、点  は線分 を
は線分 を  に内分する点なので、
に内分する点なので、  である。
である。
点  は線分
は線分  を
を  に内分する点なので、
に内分する点なので、  である。[6]
である。[6]
三角形の内心の位置ベクトル[編集]
三角形 に対し、 と置く。さらに、 と置く。三角形 の内心の位置ベクトル
と置く。三角形 の内心の位置ベクトル  を求める。[7]
を求める。[7]
の二等分線と線分  の交点を
の交点を  とする。このとき、三角形の二等分線の性質より
とする。このとき、三角形の二等分線の性質より したがって、
したがって、 である。
である。
ここで、 [8] である。
[8] である。
したがって、 である。
である。
ベクトルの内積[編集]
中学または高校の理科の力学では、力学的な仕事の定義をならったことがあるだろう。この仕事では、移動方向以外の力は、仕事に寄与しなかった。このような力の仕事の計算を、ベクトルの観点からみれば、内積という新しい概念が定義できる。[9][10]
ベクトル に対し、  となる点
となる点  をとる。このとき、
をとる。このとき、  をベクトル のなす角という。
をベクトル のなす角という。
(図)
ベクトル のなす角を  とするとき、内積
とするとき、内積  を
を

で定める。[11]
定義から、ベクトルの内積は一方のベクトルをもう一方のベクトルに射影したときの、大きさの積であると言える。
(図)
成分表示された内積[編集]
ベクトル を  と成分表示したときの、内積 について考えてみよう。
と成分表示したときの、内積 について考えてみよう。
ベクトル に対し、 となる点 をとり、ベクトル のなす角を とする。このとき  に対し余弦定理を用いて
に対し余弦定理を用いて

(図)
ここで、  と、
と、 より
より
 であるので、
であるので、  である。
である。
ここで、  なので、これを代入すれば
なので、これを代入すれば
![{\displaystyle ={\frac {1}{2}}\left[(a_{1}^{2}+a_{2}^{2})+(b_{1}^{2}+b_{2}^{2})-(b_{1}-a_{1})^{2}+(b_{2}-a_{2})^{2}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3254d6b8548e02e94bf2f728d0eb728bb602c063)
 である。
である。
したがって  が得られた。
が得られた。
内積の性質[編集]
これらはベクトルを成分表示して計算すれば証明できる。
証明 —
 とする。
とする。




ベクトル方程式[編集]
演習問題
とする。
このとき、線分OAを1:3に分ける点と、線分OBを5:2に分ける点をそれぞれ、A',B'とする。
(1) ベクトル  をベクトル
をベクトル を用いてあらわせ。
を用いてあらわせ。
(2) 線分AB'と、BA'の交点 M の位置ベクトルをベクトルを用いてあらわせ。
解答
ベクトル
と、
ベクトル

は互いに1次独立な2本のベクトルなので、
これらを用いてあらゆる図形上の点が表されるはずである。
図形上のそれぞれの点は、点Oからの位置ベクトルで表される。
例えば、ベクトル

は、点Oから見て
と平行な方向のベクトルであり、その大きさが、

であるので、

で表される。
同様に、ベクトル

は、点Oから見て
と平行な方向のベクトルであり、その大きさが、

であるので、

で表される。
次に、点A'を通過し、線分A'Bに平行な直線を
ベクトル
と
を用いて記述する方法を考える。
ここでは、
この直線上の点は、
ある定数 を用いて、
を用いて、

で表せることに注目する。
例えば、

のとき、この式が表す点は
に等しく、

のとき、

に等しく、いずれも直線
A'B上の点である。
これらに先ほど求めた
と、
の値を用いると、


が得られる。
同様に、線分AB'上の点はある定数
 を用いて、
を用いて、

で表される。
ここに先ほど得た値を代入すると、


となる。
このようにそれぞれの直線上の点が,を
用いて表された。
次に、これらの式が同じ点を示すように
,を定める。
そのためには、

,

を等しいとおいて、
,に関する連立方程式を作り、それを解けばよい。
上の式で
の係数を等しいとおくと、

が得られ、
の係数を等しいとおくと、

が得られる。
この式を連立して解くと、

,

が得られる。
この式を
,
のどちらかに代入すると、求める位置ベクトルが得られるのである。
代入すると、求めるベクトルは、


となる。
- 答え

媒介変数を使った直線のベクトル方程式[編集]
点 を通り、ベクトル  に平行な直線を
に平行な直線を  とする。 上の点を とすると、
とする。 上の点を とすると、 または
または だから
だから

となる実数 がある。
すなわち、

よって、

これを、直線 のベクトル方程式(vector equation)といい、  を の方向ベクトルという。また、 を媒介変数という。
を の方向ベクトルという。また、 を媒介変数という。
点Aの座標を 、
、 、点Pの座標を
、点Pの座標を とおくと、ベクトル方程式 は
とおくと、ベクトル方程式 は

となる。したがって

これを直線 の媒介変数表示という。
演習問題
点A を通り、
を通り、 に平行な直線の方程式を、媒介変数tを用いて表せ。
に平行な直線の方程式を、媒介変数tを用いて表せ。
また、tを消去した式で表せ。
解答
この直線のベクトル方程式は

したがって

tを消去すると、次のようになる。

2点 を通る直線のベクトル方程式を考える。
直線ABは、点Aを通り、 を方向ベクトルとする直線と考えられるから、そのベクトル方程式は
を方向ベクトルとする直線と考えられるから、そのベクトル方程式は

となる。これは次のように書ける。

演習問題
2点A ,B
,B を通る直線の方程式を、媒介変数tを用いて表せ。
を通る直線の方程式を、媒介変数tを用いて表せ。
解答
この直線のベクトル方程式は

したがって

内積を使った直線のベクトル方程式[編集]
点Aを通って、でないベクトル、 に垂直な直線をgとする。g上の点をPとすると、
に垂直な直線をgとする。g上の点をPとすると、 または
または だから
だから
 …(1)
…(1)
である。
点A,Pの位置ベクトルをそれぞれ、 とすると、
とすると、 だから、(1)は
だから、(1)は
 …(2)
…(2)
となる。(2)が点Aを通って、に垂直な直線gのベクトル方程式であり、をこの直線の法線ベクトル(ほうせんベクトル、normal vector)という。
点Aの座標を、 、点Pの座標をとおくと、
、点Pの座標をとおくと、 だから、(2)は次のようになる。
だから、(2)は次のようになる。

この方程式は、 とおくと、
とおくと、 となるから、次のことがいえる。
となるから、次のことがいえる。
直線の法線ベクトルは、である。
演習問題
点Aを通り、 に垂直な直線の方程式を求めよ。
に垂直な直線の方程式を求めよ。
解答

つまり

空間座標とベクトル[編集]
ここまでは、平面上のベクトルについて考えてきたが、ここからは3次元空間上のベクトルについて考える。より一般にベクトルはn次元(ユークリッド)空間上で定義することができるが、このようなものは高校では扱わない。
空間座標[編集]
今までは、平面上の図形をベクトルや数式を用いて表現する方法を学んで来た。
ここでいう2次元とは、平面のことである。平面上の任意の点を指定するには最低でも2以上の実数が必要だからこのように呼ばれている。
もちろん容易に分かる通り、2つ以上の次元を持っている図形も存在する。
例えば、3次元立体の1つである直方体は縦、横、高さの3つの長さを持っているので、3次元図形と呼ばれる。
空間に1つの平面をとり、その上に直交する座標軸 をとる。次にOを通りこの平面に垂直な直線
をとる。次にOを通りこの平面に垂直な直線 をひき、その直線上で、Oを原点とする座標を考える。
をひき、その直線上で、Oを原点とする座標を考える。
この3直線 は、どの2つも互いに垂直である。これらを座標軸といい、それぞれx軸、y軸、z軸という。
は、どの2つも互いに垂直である。これらを座標軸といい、それぞれx軸、y軸、z軸という。
また、x軸とy軸とで定まる平面をxy平面といい、y軸とz軸とで定まる平面をyz平面といい、z軸とx軸とで定まる平面をzx平面といい、これらを座標平面という。
空間内の点Aに対して、Aを通って各座標平面に平行な3つの平面をつくり、それらがx軸、y軸、z軸と交わる点を とし、のそれぞれの軸上での座標を
とし、のそれぞれの軸上での座標を とする。
とする。
このとき、3つの数の組

を点Aの座標といい、 をx座標といい、
をx座標といい、 をy座標といい、
をy座標といい、 をz座標という。
をz座標という。
このように座標の定められた空間を座標空間と呼び、点Oを座標空間の原点という。
球面の方程式[編集]
ここでは、特に3次元空間の図形に注目する。
まずはベクトルを用いる前に3次元空間の空間図形を、数式によって記述する方法を考察する。
2次元空間において、もっとも簡単な図形は直線であり、その式は一般的に

で表わされた。
( ,
, ,
, は任意の定数。)
ここで
は任意の定数。)
ここで ,
, は、2次元空間を代表する2つのパラメーターであり、3次元空間を用いたときには、これらは3つの文字で表わされることが期待される。
は、2次元空間を代表する2つのパラメーターであり、3次元空間を用いたときには、これらは3つの文字で表わされることが期待される。
実際このような式で表わされる図形は、3次元空間でも基本的な図形である。つまり、

が、上の式の類似物として得られる。
(,,, は任意の定数。)
は任意の定数。)
このような図形はどんな図形に対応するだろうか?
実際にはこの図形を特徴づけるのは、後に学ぶ3次元ベクトルを用いるのがもっとも簡単であるので、これは後にまわすことにする。
しかし、ただ1つこの式から分かることは、3次元空間の座標を表わすパラメーター

のうちに1つの関係

を与えることで、3次元空間上の図形を指定できるということである。この場合は、

を用いていた。
ベクトルを使わなくても図形的解釈が得られる式として、

が挙げられる。
(,,, は任意の定数。)
この式は、2次元でいうところの
は任意の定数。)
この式は、2次元でいうところの

の式の類似物である。2次元の場合はこの式は、
中心 半径の円に対応していた。
3次元のこの式は、結論をいうと中心
半径の円に対応していた。
3次元のこの式は、結論をいうと中心 半径の円に対応しているのである。
半径の円に対応しているのである。
上の式
を満たすある点 を取り、その点と点との距離を考える。
を取り、その点と点との距離を考える。
空間座標に置ける軸、
軸、
 軸はそれぞれ直交しているので、2点の距離は3平方の定理を用いて
軸はそれぞれ直交しているので、2点の距離は3平方の定理を用いて

で与えられる。
しかし、上の式からここで選んだ点は、条件
を満たしているので、2点の距離は


である。
( を用いた。)
を用いた。)
よって、上の式を満たす点は全て点からの距離がである点であり、これは中心半径の円に他ならない。
演習問題
中心

半径

の球の式を求めよ。
解答
に代入することで、

が求められる。
演習問題

がどのような
球に対応するか計算せよ。
解答
このような数式が球に対応するとき、

の係数は必ず等しくなくてはならない。そうでない場合はこの図形は楕円体に対応するのだが、これは指導要領の範囲外である。
ここでは上の式はその条件を満たしている。
ここでは、この式を
の形に持って行くことが重要である。
のそれぞれについてこの式を平方完成すると、


が得られる。よって、上の式
は、
中心

、半径

の球に対応する。
空間におけるベクトル[編集]
次に3次元空間上におけるベクトルを考察する。
2次元空間上ではベクトルは2つの量の組み合わせで表わされた。
これは1つのベクトルはx軸方向に対応する量とy軸方向に対応する量の2つを持っている必要があったからである。
このことから、3次元空間のベクトルは3つの量の組み合わせで書けることが予想される。
特に軸方向の成分,
軸方向の成分,
軸方向の成分
(,,は任意の定数。)
で表わされるベクトルを、
と書いて表わすことにする。
2次元平面では
あるベクトル

は、
(,は任意の定数。)


の2本のベクトルを用いて、

で表わされた。
3次元空間でもこのような記述法があり、上で用いたベクトル

は、



を用いて

と書かれたベクトルに対応している。
3次元ベクトルに対しても2次元ベクトルで定めた定義や性質がほぼそのまま成立する。
3次元ベクトルの加法は、それぞれのベクトル要素を独立に足し合わせることによって定義する。


また、それぞれのベクトルの要素が全て等しいベクトルを"ベクトルとして等しい"と表現する。
演習問題
ベクトルの和

を計算せよ。
解答


が得られる。
空間ベクトルの内積[編集]
ベクトル,間のベクトルの内積も平面の場合と同様に
(は、ベクトル,のなす角。)
分配法則や1次独立の性質もそのまま成り立つ。
ただし、3次元空間の全てのベクトルを張るには、3つの線形独立なベクトルを持って来る必要がある。
このことの証明はおそらく線型代数学などに詳しい。
演習問題
2つのベクトルの内積

を計算せよ。
解答
2次元の場合と同じようにここでもそれぞれの要素は互いに直交する単位ベクトル

によって張られている。そのため以前と同じく要素ごとの計算が可能であり、


となる。
もうすこし細かく計算を行なうと、

が得られる。それぞれのベクトルを

に従って展開し、

( ,
, は1,2,3のどれか。)
を代入することで上の式が計算できるはずである。
は1,2,3のどれか。)
を代入することで上の式が計算できるはずである。
しかし、
とが等しくないときには

が成り立つことから、上の展開した後の9個の項のうちで、6つは

に等しい。
また、
とが等しいときには

が成り立つことから、上の式
の展開は

となって確かに要素ごとの計算と一致する。
演習問題
2次元空間のベクトルは2本の1次独立なベクトルがあれば、必ずそれらの線形結合によって計算できるはずである。
ここで、

と

を用いて、

を、

の形に書いてみよ。
(,は、何らかの定数。)
解答
2次元のベクトルの係数を求める問題である。
,の文字をそのまま用いると、,の満たす条件は

つまり

となる。これは
,に関する連立1次方程式で書き換えられる。

これを解くと、


が得られる。
よって、
上の式は

と書け、確かに2本の線形独立なベクトルによって他のベクトルが書き表されることが分かった。
このような計算は3次元ベクトルに対しても可能であるが、計算手法として3元1次連立方程式を扱う必要があり、指導要領の範囲外である。実際の計算手法は、線型代数学,物理数学I 線形代数を参照。
この表式を用いて、以前見た
の図形的解釈を述べる。
この図形上の任意の点をで表わす。
この点は原点Oに対する位置ベクトルを用いるとで与えられる。
便宜のために
このベクトルを と書くことにする。
と書くことにする。
一方、ベクトルを用いると、上の式はベクトルの内積を用いて で与えられる。
つまり、この式で表わされる図形はあるベクトル
との内積を一定に保つ図形である。
この図形は、実際には
に直交する平面で与えられる。
なぜならこのような平面上の点は、必ず平面上のある一点の位置ベクトルに加えて、
ベクトル
に直交するベクトルを加えたもので書くことが出来る。
しかし、
ベクトル
に直交するベクトルと
ベクトル
の内積は必ず0であるので、
このような点の集合は
ベクトル
と一定の内積を持つのである。
で与えられる。
つまり、この式で表わされる図形はあるベクトル
との内積を一定に保つ図形である。
この図形は、実際には
に直交する平面で与えられる。
なぜならこのような平面上の点は、必ず平面上のある一点の位置ベクトルに加えて、
ベクトル
に直交するベクトルを加えたもので書くことが出来る。
しかし、
ベクトル
に直交するベクトルと
ベクトル
の内積は必ず0であるので、
このような点の集合は
ベクトル
と一定の内積を持つのである。
よって元の式
は、
ベクトルに直交する平面に対応することが分かった。
次にが、図形が表わす平面と、原点との距離に関係があることを示す。
特に、ベクトルに比例する位置ベクトルを持つ点を考える。このときこの点と原点との距離は、
平面
と原点との距離に対応する。
なぜなら、位置ベクトルは、原点から平面
に垂直に下ろした線に対応するからである。
このことから仮に方向の単位ベクトルをと書き、平面と原点との距離を と書くと、
と書くと、 が得られる。
この式を
が得られる。
この式を
に代入すると、


が得られる。よって、は、
平面と原点の距離とベクトルの大きさをかけたものである。
演習問題
特にベクトル

を取ると、どのような式が得られて、その式は
どのような図形に対応するか。
解答
このとき
は、


に対応する。
この式は座標がに対応し、それ以外の,座標を任意に動かした
平面に対応しているが、これは
 平面に平行であり、
平面からの距離がである平面である。
また、平面とベクトル
平面に平行であり、
平面からの距離がである平面である。
また、平面とベクトル
は直交しているので、そのことからもこの式は正しい。
- 答
- 平面に平行であり、平面からの距離がである平面。
発展:外積[編集]
外積は高校数学範囲外で入試には出ないが、外積は数学や物理などに応用でき、便利なのでここで扱う。
三次元ベクトル に対し、外積  を次を満たすものとする。
を次を満たすものとする。
- は それぞれと垂直[12]
- フレミングの左手の法則の格好をする。このとき、中指を 、人差し指を 、としたとき、 は親指の方向である。
- ベクトル のなす角を とする。
 [13]
[13]
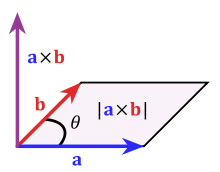 外積の方向を表した図。上の→記号がないが、これはベクトルである。
外積の方向を表した図。上の→記号がないが、これはベクトルである。
次に外積の成分表示を考えてみよう。この定義から成分表示を直接導くのは面倒なので、天下り的に成分表示を与えてから、それが外積の定義を満たすことを確認する。
 、
、 としたとき、
としたとき、 である。
である。
まずは、 は それぞれと垂直であることを確認する。これは、 と
と  であることを成分表示を代入すれば証明できる。
であることを成分表示を代入すれば証明できる。
次に、 を証明する。 。ここで、
。ここで、  を代入し、
を代入し、 を得る。この式に、成分表示を代入すれば、両辺が等しいことが確認できる。
を得る。この式に、成分表示を代入すれば、両辺が等しいことが確認できる。
最後に、フレミングの左手の法則で は親指の方向であることを確認する。
 、
、  のとき、
のとき、 である。これより、二番目の性質も確認できた。
である。これより、二番目の性質も確認できた。
外積の応用
2つのベクトルに垂直なベクトルを求めたいときなどは、外積の成分表示から計算すれば、面倒な計算をしなくても求められる。
四面体  の体積は
の体積は  である。
実際、
である。
実際、  である。ただし、 h はΔABCを底面としたときの四面体の高さである。
である。ただし、 h はΔABCを底面としたときの四面体の高さである。
また、物理学のローレンツ力は外積を使うと  と簡潔に表せる。
と簡潔に表せる。
覚え方
図のように要素をかけ合わせる。

コラムなど[編集]
| ベクトルの理論の歴史
|
 ハミルトン ハミルトン
複素数とベクトルの理論はそれぞれ独立した理論として教えられているが、歴史的にはハミルトンによって複素数を拡張した四元数が発見され、四元数を元にギブスなどによってベクトルが発見された。
四元数は、
- a + bi + cj + dk (a,b,c,dは実数)
のように、実数と3つの虚数単位i,j,kをもちいて表される数である。
ここで、i,j,k は i^2=-1, j^2=-1, k^2=-1 を満たす数で、i,j,k は互いに異なる。
実数の単位1個に加えて、さらに3つの単位 i, j, k をもっているので、合計で4個の単位があるので四元数といわれるわけである。
さて、ハミルトンによる四元数の発見後、さらに研究が進むと、図形や物理学などの問題を解くさいには 2乗して-1になる性質はほとんどの空間・立体(3次元の図形)の問題を解く応用の場合には不要であることが分かり、学校教育の場ではベクトルと複素数を別々に教えるようになったわけである。
そして、四元数の公式のうち、ベクトルでも類似の公式が成り立つ場合には、その四元数の公式がベクトル用に改良されてベクトルの公式として輸入されたので、結果的にハミルトンはベクトルの公式の発見者としても紹介されることになった。
また、四元数は現代では3DCGなどの分野で応用されている。
|
- ^ または、太文字で
 などと表記されることもある。しかし、日本の高等学校、大学入試では
などと表記されることもある。しかし、日本の高等学校、大学入試では  がほとんどである。
がほとんどである。
- ^ ベクトルとして等しくても、有向線分として等しいとは限らない
- ^

- ^

- ^
 の場合、つまり線分を に外分する点は存在しない。なぜなら、任意の線分ABに対してAP:BP=1:1となる点Pは線分ABの直角二等分線上にあるが、点Pが線分AB上にある場合、これは内分点であり、点Pが線分AB上にない場合、これは外分点ではありえない。
の場合、つまり線分を に外分する点は存在しない。なぜなら、任意の線分ABに対してAP:BP=1:1となる点Pは線分ABの直角二等分線上にあるが、点Pが線分AB上にある場合、これは内分点であり、点Pが線分AB上にない場合、これは外分点ではありえない。
- ^

- ^ ここで、線分の長さと頂点の位置ベクトルを同じアルファベットで置いているが、記号
 のついているものは、ベクトル。記号 のついていないものは実数であることに注意せよ。
のついているものは、ベクトル。記号 のついていないものは実数であることに注意せよ。
- ^ より

- ^ 物理数学Iなどを参照
- ^ これは、内”積”という名前がついているが、実数の”積”とは様子が違い、単純に実数の積をベクトルに拡張したものが内積というわけではない。実数の積は実数から実数への演算であるが、ベクトルの内積はベクトルから実数への演算である。
- ^ 内積 を
 や のように表記してはいけない。 はベクトルの外積(範囲外)を表す。
や のように表記してはいけない。 はベクトルの外積(範囲外)を表す。
- ^ 数式で表すと
 かつ
かつ 
- ^
 はベクトル の作る平行四辺形の面積に等しい。
はベクトル の作る平行四辺形の面積に等しい。















