
高等学校工業 機械設計/機械要素と装置/ベルト
< 高等学校工業 機械設計 | 機械要素と装置
ベルト伝導は、離れた2軸をつなげて便利である。平ベルトには滑りがある。
ベルトとプーリにに歯をもたせ、噛みあうようにして滑りを防いだ、歯付ベルトがある。
ベルトの掛け方には、平行がけの他に、たすきがけ(「十字がけ」とも言う)などがある。
-
 歯付きベルトとプーリー。図の2番や4番が歯付きベルト。
歯付きベルトとプーリー。図の2番や4番が歯付きベルト。 -
 一般的なフラットベルト(平ベルト)。
一般的なフラットベルト(平ベルト)。 -
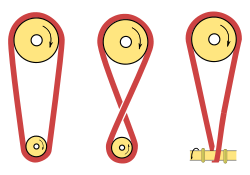 ベルトの掛け方。一番左が平行がけ。真ん中が十字がけ。
ベルトの掛け方。一番左が平行がけ。真ん中が十字がけ。


.svg)
ベルトの長さ
[編集]平行掛けの場合、2個のプーリの径をそれぞれD1[mm]およびD2[mm]とすると、ベルトの長さLと巻きかけ角度θは、以下の式になる。φはプーリの共通接線が、プーリの中心を通る線となす角度である。2個のプーリのプーリ中心間の距離をa[mm]とする。すると、


とは三角関数 の逆関数である。 つまり、



のときに、

という式で、は定義される。 sinの逆関数が と表記される場合もある。

長さの近似式として、上の長さの式の中にあるcosの、べき級数展開の2次の項までの近似式を用いて、ベルトの長さの近似式を用いる場合もある。cosの2次までの展開式は、

である。長さの近似式は、結果的には、

となる。