本項は高等学校数学Cの「複素数平面」の解説です。
数学Ⅱの複素数と方程式及び三角関数を履修後に学習してください。数学Cのベクトル・二次曲線の先行履修を推奨します。また、数学Ⅲの積分法より前の履修が望ましいです。数学Cの行列とはどちらの順番で履修しても構いません。
 複素数
複素数  (
( は実数)は、複素数平面では直交座標 (a, b) に対応する。"Re" は実軸(real part)、"Im" は虚軸(imaginary part)を意味する。
は実数)は、複素数平面では直交座標 (a, b) に対応する。"Re" は実軸(real part)、"Im" は虚軸(imaginary part)を意味する。
虚数単位  を
を  を満たす数とする。2つの実数 によって
を満たす数とする。2つの実数 によって  と表される数を複素数という。
と表される数を複素数という。
座標平面上の点  と複素数 を同一視することで、複素数を座標平面上の点と考えることができる。この平面を複素数平面(complex plane)という。[1]
と複素数 を同一視することで、複素数を座標平面上の点と考えることができる。この平面を複素数平面(complex plane)という。[1]
複素数平面において、  軸を実軸(real part)、
軸を実軸(real part)、  軸を虚軸(imaginary part)という。
軸を虚軸(imaginary part)という。
複素数平面上で複素数  に対応する点
に対応する点  のことを
のことを  と表現し、「点」と呼ぶこともある。
と表現し、「点」と呼ぶこともある。
複素数の加法・減法・実数倍を複素数平面上で考えると、それぞれベクトルの加法・減法・実数倍に対応する。
すなわち、 を実数とすると、
を実数とすると、
- 点
 は点
は点 を実軸方向にc、虚軸方向にdだけ平行移動した点である。
を実軸方向にc、虚軸方向にdだけ平行移動した点である。
- 点
 は点を実軸方向に-c、虚軸方向に-dだけ平行移動した点である。
は点を実軸方向に-c、虚軸方向に-dだけ平行移動した点である。
- 点
 は点の原点からの距離をk倍に拡大した点である。
は点の原点からの距離をk倍に拡大した点である。
なお、 のとき、「実軸方向にa、虚軸方向にbだけ平行移動」を「だけ平行移動」と表現する場合がある。
のとき、「実軸方向にa、虚軸方向にbだけ平行移動」を「だけ平行移動」と表現する場合がある。
ベクトルと同様に、3点 が一直線上にある条件は、
が一直線上にある条件は、 となる実数
となる実数 が存在することである。
が存在することである。
複素数 について複素数  を の共役複素数[2]といい、
を の共役複素数[2]といい、 で表す。
で表す。
複素数 と複素数  は原点に対して対称であり、複素数 と複素数 は実軸に対して対称である。
つまり、次のことが成り立つ。
は原点に対して対称であり、複素数 と複素数 は実軸に対して対称である。
つまり、次のことが成り立つ。
- が実数

- が純虚数
 (ただし
(ただし )
)
また、 である。
である。
- 問題
- 複素数の実部と虚部をそれぞれ
 を用いて表せ。
を用いて表せ。
- 以下を証明せよ





上で証明した性質を用いると、数学Ⅱで習った「実数係数のn次方程式の解の一つがならば、 も方程式の解の一つである」ことを証明できる。
も方程式の解の一つである」ことを証明できる。
複素数平面において、複素数 から原点までの距離を絶対値といい  で表す。三平方の定理より
で表す。三平方の定理より  である。
である。  のとき、実数の絶対値で考えた時と同じ結果になることがわかる。
のとき、実数の絶対値で考えた時と同じ結果になることがわかる。
2点 間の距離(すなわち線分
間の距離(すなわち線分 の長さ
の長さ )を考える。平行移動しても線分の長さは変わらないので、点
)を考える。平行移動しても線分の長さは変わらないので、点 を原点
を原点 に移す平行移動を考えると、
に移す平行移動を考えると、 だけ平行移動するので、点
だけ平行移動するので、点 は点
は点 へと移る。
つまり、
へと移る。
つまり、 である。
である。
 である。が実数のとき、
である。が実数のとき、 なので実数の絶対値の2乗の計算と一致する。
なので実数の絶対値の2乗の計算と一致する。
 に対応する点。
に対応する点。
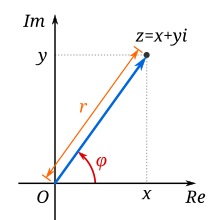
上記のように、複素数平面では、複素数の実部と虚部をそれぞれ平面上の点の直交座標に対応させている。ところで、平面上の点の位置の表し方として、直交座標の他に極座標があった。点の位置を極座標で表すことに対応する複素数の表し方を、極形式という。直交座標と極座標は

で変換することができるのであった。つまり、極形式とは次のような形の複素数の表現である。

ここで、 を複素数の偏角といい、
を複素数の偏角といい、 で表す。また、
で表す。また、 である。は原点、、
である。は原点、、 を頂点とする三角形の原点の角度を表している。
を頂点とする三角形の原点の角度を表している。
逆三角関数を知っている読者は「偏角は で求められる」と思うであろうが、逆正接関数の値域は
で求められる」と思うであろうが、逆正接関数の値域は であり、偏角は基本的に
であり、偏角は基本的に あるいは
あるいは の範囲で表すため、場合分けが必要になってしまい面倒である。なので、偏角を求めるときは素直に
の範囲で表すため、場合分けが必要になってしまい面倒である。なので、偏角を求めるときは素直に の値からその値をとるを求めよう。
の値からその値をとるを求めよう。
の極形式は、 である。
つまり、
である。
つまり、 が成り立つ。
が成り立つ。
極形式で複素数を表すと、複素数の積が次のように簡単に計算できる。
 ,
,  とすると、
とすると、

- ただし、三行目から四行目への式変形は三角形の加法定理を使った。
- 次に複素数の商を計算してみよう。
- とすると、

- なので、

- である。
- これから、複素数
 に複素数
に複素数  をかける操作は、複素数 の原点からの距離を
をかける操作は、複素数 の原点からの距離を  倍し、原点周りに
倍し、原点周りに  だけ回転した点に移す操作であると、複素数 を複素数 で割る操作は、複素数 の原点からの距離を
だけ回転した点に移す操作であると、複素数 を複素数 で割る操作は、複素数 の原点からの距離を  倍し、原点周りに
倍し、原点周りに  だけ回転した点に移す操作であると、幾何学的に理解できる。
だけ回転した点に移す操作であると、幾何学的に理解できる。
- また、この性質から以下の性質が直ちに導かれる。
-




整数  に対し、複素数
に対し、複素数  の 乗は、
の 乗は、

となることが知られている。これを ド・モアブルの定理 という。数学Iで習ったド・モルガンの法則と混同しないように注意。
これを証明しよう。
まず、 の場合を数学的帰納法で証明する。
の場合を数学的帰納法で証明する。
 のとき、
のとき、
- (左辺)

- (右辺)

である。
 とし、
とし、
 のとき
のとき

が成り立つと仮定すると

- となり、 の場合も証明できた。
のとき、

したがって、 が整数のときド・モアブルの定理が成り立つことが証明できた。
ド・モアブルの定理を用いて、についての次方程式

の複素数解をすべて求めてみよう。まず、aが正の実数のときを考える。 と極形式で表すとき、ド・モアブルの定理より
と極形式で表すとき、ド・モアブルの定理より である。正の実数aの絶対値はa、偏角は0であることに注意すると、を満たすとき、
である。正の実数aの絶対値はa、偏角は0であることに注意すると、を満たすとき、

でなければならないことがわかる。ただし は整数である。rが正の実数であることに注意してこの式を解くと、
![{\displaystyle r={\sqrt[{n}]{a}},\ \theta ={\frac {2k\pi }{n}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1fc24877d6c9447ab7ec9356e41082429d4cc16f)
であるから、整数kを用いて
![{\displaystyle z={\sqrt[{n}]{a}}\left(\cos {\frac {2k\pi }{n}}+i\sin {\frac {2k\pi }{n}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/aa573523baa036ed2fb131cf597799746fae117d)
と表される数が複素数解のすべてである。
一般の複素数に対して、zについてのn次方程式

を考えると、まったく同様の計算により解は整数kを用いて
![{\displaystyle z={\sqrt[{n}]{|\alpha |}}\left(\cos {\frac {\arg \alpha +2k\pi }{n}}+i\sin {\frac {\arg \alpha +2k\pi }{n}}\right)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e427b488cea6599f69632c5285afa8a0ea266e04)
と表される。
偏角が  の整数倍ずれるだけの複素数は同じ複素数であることに注意すると、いずれの場合も異なる解はちょうどn個存在することがわかる。そのn個の解を複素数平面上で考えると、zのn乗根は原点を中心とする正n角形を描くことが確かめられる。
の整数倍ずれるだけの複素数は同じ複素数であることに注意すると、いずれの場合も異なる解はちょうどn個存在することがわかる。そのn個の解を複素数平面上で考えると、zのn乗根は原点を中心とする正n角形を描くことが確かめられる。
ここでは、複素数平面を利用して幾何学的な問題を解くことを考える。
 とすると、複素数平面とベクトルの対応から点の位置ベクトルはそれぞれ
とすると、複素数平面とベクトルの対応から点の位置ベクトルはそれぞれ となる。
となる。
このとき、線分を に内分する点、外分する点の位置ベクトルはそれぞれ
に内分する点、外分する点の位置ベクトルはそれぞれ と求まる。
と求まる。
もう一度ベクトルと複素数平面の対応を考えると、それぞれ と変形できる。
と変形できる。
つまり、線分をに内分する点、外分する点を表す複素数は
 である。
である。
中点・重心に関しても位置ベクトルと同様の公式が成り立つ。
を複素数、 を正の実数とする。 方程式
を正の実数とする。 方程式  を満たす複素数 の軌跡は、 を中心とし、 を半径とする円である。これは円のベクトル方程式の複素数表示である。
を満たす複素数 の軌跡は、 を中心とし、 を半径とする円である。これは円のベクトル方程式の複素数表示である。
 を複素数とする、方程式
を複素数とする、方程式  を満たす複素数 の軌跡は、 を通る線分の垂直二等分線である。
を満たす複素数 の軌跡は、 を通る線分の垂直二等分線である。
異なる2点からの距離の比がm:nである点全体の集合はm=nのときは2点を結ぶ線分の垂直二等分線であるが、m≠nのときは2点を直径の両端に持つ円となる。この円をアポロニウスの円という。
例えば、方程式 を満たす点zの集合は、
を満たす点zの集合は、






 点1を中心とする半径2の円
点1を中心とする半径2の円
と求まる。
この円は点-3, 点0からの距離の比が2:1なアポロニウスの円である。
複素数平面上の点  に対し、
に対し、  はベクトル
はベクトル  とベクトル
とベクトル  のなす角である。特に、
のなす角である。特に、  が実数のときベクトル とベクトル は平行。 が純虚数のときはベクトル とベクトル は垂直である。
が実数のときベクトル とベクトル は平行。 が純虚数のときはベクトル とベクトル は垂直である。
 が描く図形の問題は入試でよく見られる。
与えられた条件からzの方程式を導き、wの関係式に変形して解いていく。
が描く図形の問題は入試でよく見られる。
与えられた条件からzの方程式を導き、wの関係式に変形して解いていく。
例えば、zが点 を通り実軸に垂直な直線上を動くとき、点zは原点と点1を結ぶ線分の垂直二等分線上を動くので、
を通り実軸に垂直な直線上を動くとき、点zは原点と点1を結ぶ線分の垂直二等分線上を動くので、 である。
である。 より
より なので、
なので、 である。よって、点wは原点を除いた、点1を中心とする半径1の円を描く。
である。よって、点wは原点を除いた、点1を中心とする半径1の円を描く。
複素数 に複素数 をかけた複素数  は、複素数 を原点を中心に だけ回転した点を表す。これはド・モアブルの定理を用いて証明できる。
は、複素数 を原点を中心に だけ回転した点を表す。これはド・モアブルの定理を用いて証明できる。
「負の数に負の数を掛けたら正の数になる」という中学1年生で習った事実の数学的な説明はこの定理を用いて初めてできる。
一般に、複素数 を複素数 を中心に だけ回転した点  は、
は、 である。
である。
 の形にすると覚えやすいだろう。
の形にすると覚えやすいだろう。
複素数にを掛ける操作はの位置ベクトルに回転行列 を掛ける一次変換に対応する。
一般に複素数は二次行列
を掛ける一次変換に対応する。
一般に複素数は二次行列 に対応することが知られている。
回転移動の計算は、行列を用いる場合に比べて複素数を用いた方が楽な場合が多い。
特に、回転の中心が原点ではない場合、行列の場合は余計な次元を追加して計算する必要がある(詳しくはアフィン変換を参照)。それに比べ、複素数の場合は比較的単純な計算で一般の点を中心とした回転を求めることができる。
に対応することが知られている。
回転移動の計算は、行列を用いる場合に比べて複素数を用いた方が楽な場合が多い。
特に、回転の中心が原点ではない場合、行列の場合は余計な次元を追加して計算する必要がある(詳しくはアフィン変換を参照)。それに比べ、複素数の場合は比較的単純な計算で一般の点を中心とした回転を求めることができる。
- 発展:図形の回転
図形は点の集合なので、図形の回転移動は点の回転移動に帰結する。つまり、点の座標が定数から変数に変わるだけである。図形を表す方程式がわかっていれば、回転移動した図形を表す方程式を求められる。
回転前の点をX(x,y)、回転後の点をY(x', y')とする。
このとき、「Xをθだけ回転したらYに移った」と考えると最終的に出てくる式はそれぞれ左辺にx',y'、右辺に(xの式),(yの式)が来る形となる。
xとyの関係式(回転前の図形を表す方程式)に代入するためにはそれぞれ左辺にx,y、右辺に(x'の式),(y'の式)が来る形にする方が望ましい。
そのため、発想を逆転させて「Yを-θだけ回転したらXに移った」と考える。
こうすると、最終的に出てくる式はそれぞれ左辺にx,y、右辺に(x'の式),(y'の式)が来る形となる。
具体的に計算すると、


この式を図形の方程式に代入すると、回転後の図形の方程式となる。
陽関数 は陰関数表示
は陰関数表示 へと変形できる。
へと変形できる。
図形の回転
図形を表す方程式がであるとき、原点を中心にだけ回転させた図形の方程式は である。
である。
記述式の問題の場合、上の公式に代入するのではなく、先ほど述べた手順で式変形して求めるのが望ましい。
- ^ 複素平面やガウス平面と呼ばれることもある。
- ^ 本来は「共軛」と書く。


